서울대 박용래 교수팀, 생체근육의 감각기관 닮은 인공근육 개발 성공
서울대 공대는 서울대 기계항공공학부 박용래 교수팀이 생체근육의 고유수용 감각기관을 모사한 소프트 센서가 내장된 인공근육을 개발했다고 20일 밝혔다. 이번 연구로 로봇의 근육 단위 제어가 가능해져, 사람이나 동물과 유사하게 움직이는 소프트 로봇을 개발할 수 있게 됐다.
이번 연구에 사용된 소프트 센서는 아주 얇고 잘 늘어나는 성질이 있어 인공 근육의 크기와 무게에 거의 영향을 주지 않으면서도 근육의 변형에도 문제없이 사용할 수 있다는 장점이 있다. 또한 인공근육을 납작한 패치 형태로 만들었기 때문에 부피가 최소화되어 사람과 같이 크고 작은 수많은 근육으로 이루어진 소프트 로봇 개발도 가능하다
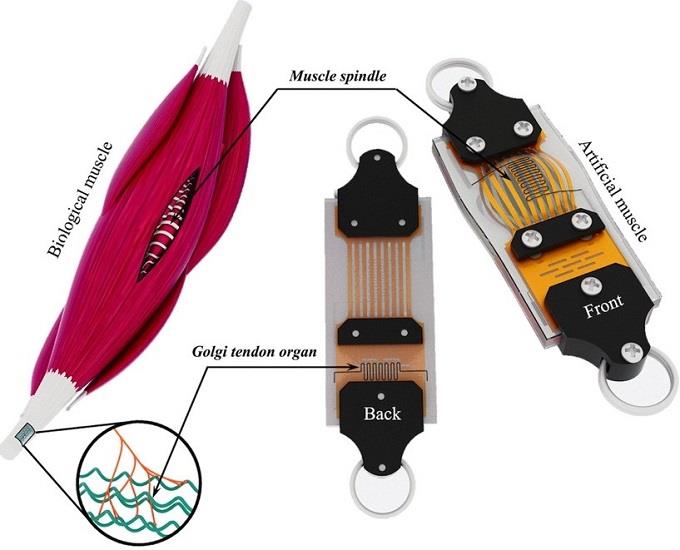
▲생체 근육과 인공 근육의 고유수용기 비교
생체 근육에는 근육이 일을 할 때 근육이 수축하는 길이와 근육이 수축하는 힘을 감지하는 근방추(Muscle spindle)와 골지힘줄기관(Golgi tendon organ)이라는 고유수용 감각기(Proprioceptor)가 존재한다. 사람이나 동물은 이 감각기관의 작용을 통해 근육을 제어하여 원하는 몸의 움직임 또는 힘을 만들 수 있다.
지금까지의 로봇들은 센서의 수가 제한되어 있어 전체적인 움직임이나 힘을 제어하는 것에 그쳤으며, 구동기 자체를 세부적으로 제어하여 협력적인 움직임을 만들어내는 데에는 한계가 있었다.
박용래 교수팀은 이러한 한계를 개선하고자 생체 근육의 근방추와 골지힘줄기관을 모사한 소프트 센서를 액체 전도체를 이용해 공압 인공근육에 직접 내장함으로써 인공근육 자체의 수축 길이와 수축력을 동시에 측정할 수 있게 했다. 각 근육에 붙어있는 소프트 센서의 신호를 실시간으로 이용한다면 로봇으로 인간의 섬세하고 부드러운 움직임을 구현할 수 있을 것이다.
미국 카네기멜론 대학교(Carnegie Mellon University)와 공동 연구로 이루어진 박용래 교수팀의 연구 결과는 소프트 로봇 분야 국제 학술지인 ‘소프트 로보틱스(Soft Robotics)’ 8월호에 표지 논문으로 게재되었다. 논문 제목은 ‘Sensorized, Flat, Pneumatic, Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback) ‘이다.
